




1. Kesukaran dalam Proses Pemasangan Teras Injap
Dalam kajian ini, selepas menyerap pengalaman reka bentuk sistem pemasangan automatik lain, sistem pemasangan separa automatik sedia ada telah dianalisis, dan bahagian mekanikal sistem direka bentuk sepenuhnya berdasarkan simulasiteras injapproses pemasangan. Dalam pelan reka bentuk sistem, kami berusaha untuk menjadikan pemprosesan bahagian mekanikal mudah, meminimumkan kos, menjadikan pemasangan bahagian mudah dan mudah, dan menjadikan sistem mempunyai tahap keterbukaan dan kebolehkembangan tertentu, untuk meningkatkan kebolehpercayaan dan kecekapan sistem. , dan meletakkan asas yang baik untuk meningkatkan prestasi kos sistem.
Theinjapterassistem pemasangan terbahagi terutamanya kepada tiga bahagian dari segi reka bentuk struktur mekanikalnya, iaitu: dua bahagian pemasangan di sudut kiri atas meja kerja, tiga bahagian pemasangan di sudut kiri bawah dan tujuh bahagian pemasangan di sebelah kanan bahagian meja kerja. Kesukaran teknikal pemasangan dua keping terletak pada cara memastikan bentuk bulat cincin pengedap. Semasa proses pemotongan, ia akan tertakluk kepada daya penyemperitan paksi bilah, jadi ia mudah berubah bentuk. Kedua, semasa proses pemasangan, apabila rod teras dikesan pada komponen perkakas pemindahan, adalah perlu untuk merealisasikan pemeriksaan dan pemasangan antara komponen teras pintu yang berbeza melalui getaran. Oleh itu, setiap komponen jatuh dalam kedudukan yang sepadan untuk menjadi pautan pemasangan. Kesukaran proses terletak pada. Masalah di atas adalah sebab utama peningkatan kadar produk yang rosak dalam pemasangan teras injap pada peringkat ini. Berdasarkan ini, kertas kerja ini mengoptimumkan proses pemasangan teras injap, dan menambah sistem pemeriksaan kualiti untuk meningkatkan kadar kelayakan pemasangan teras injap.
2. Skim Pemasangan Teras Injap Pintar
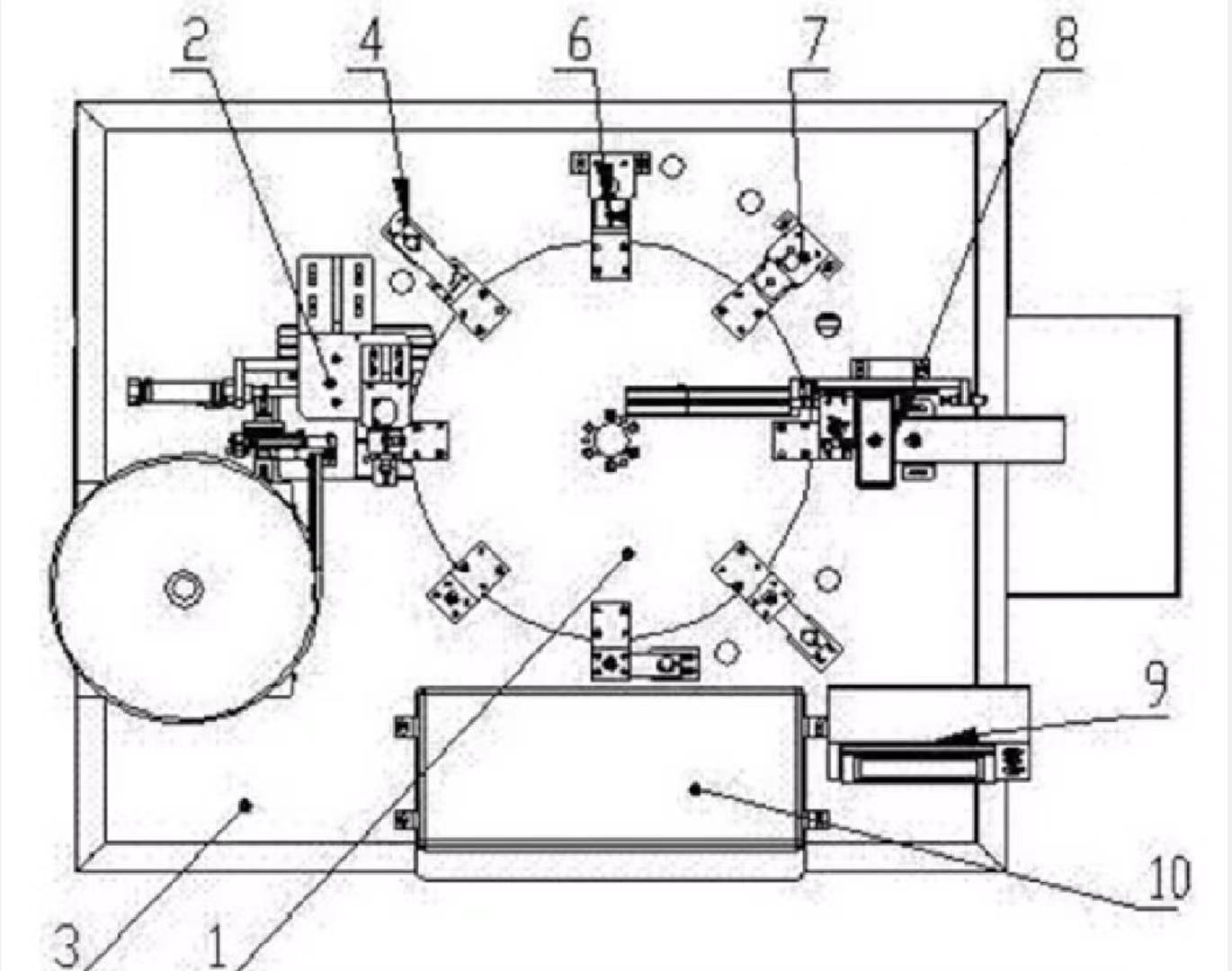
Antara muka operasi dan PLC membentuk bahagian kawalan logik, dan sistem pengesanan dan PLC mempunyai aliran maklumat dua hala untuk mengumpul data status sistem pemasangan dan mengeluarkan isyarat kawalan. Sebagai bahagian eksekutif, sistem pemacu dikawal secara langsung oleh bahagian keluaran PLC. Kecuali sistem pemakanan, yang memerlukan bantuan manual, proses lain dalam sistem ini telah merealisasikan pemasangan pintar. Interaksi manusia-komputer yang baik dicapai melalui skrin sentuh. Memandangkan kemudahan operasi dalam reka bentuk mekanikal, kotak penempatan teras pintu bersebelahan dengan skrin sentuh. Mekanisme pengesanan, komponen tiupan bukaan atas teras pintu, komponen pengesanan ketinggian teras injap dan mekanisme blanking masing-masing disusun di sekeliling komponen perkakas meja putar, merealisasikan susun atur pengeluaran barisan pemasangan pemasangan teras pintu. Sistem pengesanan terutamanya melengkapkan pengesanan rod teras, pengesanan ketinggian pemasangan, pemeriksaan kualiti, dan lain-lain, yang bukan sahaja merealisasikan automasi pemilihan bahan dan kunci teras injap, tetapi juga memastikan kestabilan dan kecekapan tinggi proses pemasangan. Struktur setiap unit sistem ditunjukkan dalam Rajah 1.
Seperti yang ditunjukkan dalam rajah di bawah, meja putar ialah pautan pusat keseluruhan proses, dan pemasangan teras injap diselesaikan dengan pemacu meja putar. Apabila mekanisme pengesanan kedua mengesan komponen yang akan dipasang, ia menghantar isyarat kepada sistem kawalan, dan sistem kawalan menyelaraskan kerja setiap unit proses. Mula-mula, cakera bergetar menggegarkan teras pintu keluar dan menguncinya dalam mulut injap masukan. Mekanisme pengesanan pertama akan menyaring terus teras injap yang tidak berjaya dipasang sebagai bahan yang tidak baik. Komponen 6 mengesan sama ada pengudaraan teras injap layak, dan komponen 7 mengesan sama ada ketinggian pemasangan teras injap memenuhi standard. Hanya produk yang layak dalam tiga pautan di atas akan ditangkap ke dalam kotak produk yang baik, jika tidak, produk tersebut akan dianggap sebagai produk yang rosak.
Perhimpunan pintarteras injapialah kesukaran teknikal reka bentuk sistem. Dalam reka bentuk ini, reka bentuk tiga silinder diguna pakai. Silinder slaid mengawal pelepasan untuk memastikan keunikan pelepasan; silinder kedua memastikan rod kunci diselaraskan dengan lubang pelepasan, dan kemudian bekerjasama dengan silinder slaid untuk melengkapkan teras injap memasuki rod kunci, dan kemudian Silinder kedua terus menolak keseluruhan mekanisme penguncian untuk bergerak, dan muncung sedutan akan menyedut injap apabila ia mencapai bahagian bawah perkakas. Akhirnya, selepas silinder ketiga menolak mekanisme penguncian ke tempatnya, motor servo menghantar teras injap ke mulut injap pengambilan untuk melengkapkan pemasangan teras injap. Proses ini memastikan ketepatan dan keunikan kedudukan pergerakan membujur dan sisi, dan menyediakan penyelesaian yang baik kepada kesukaran teknikal pemasangan teras pintu.
3. Reka Bentuk Komponen Utama Sistem Pemasangan Teras Injap
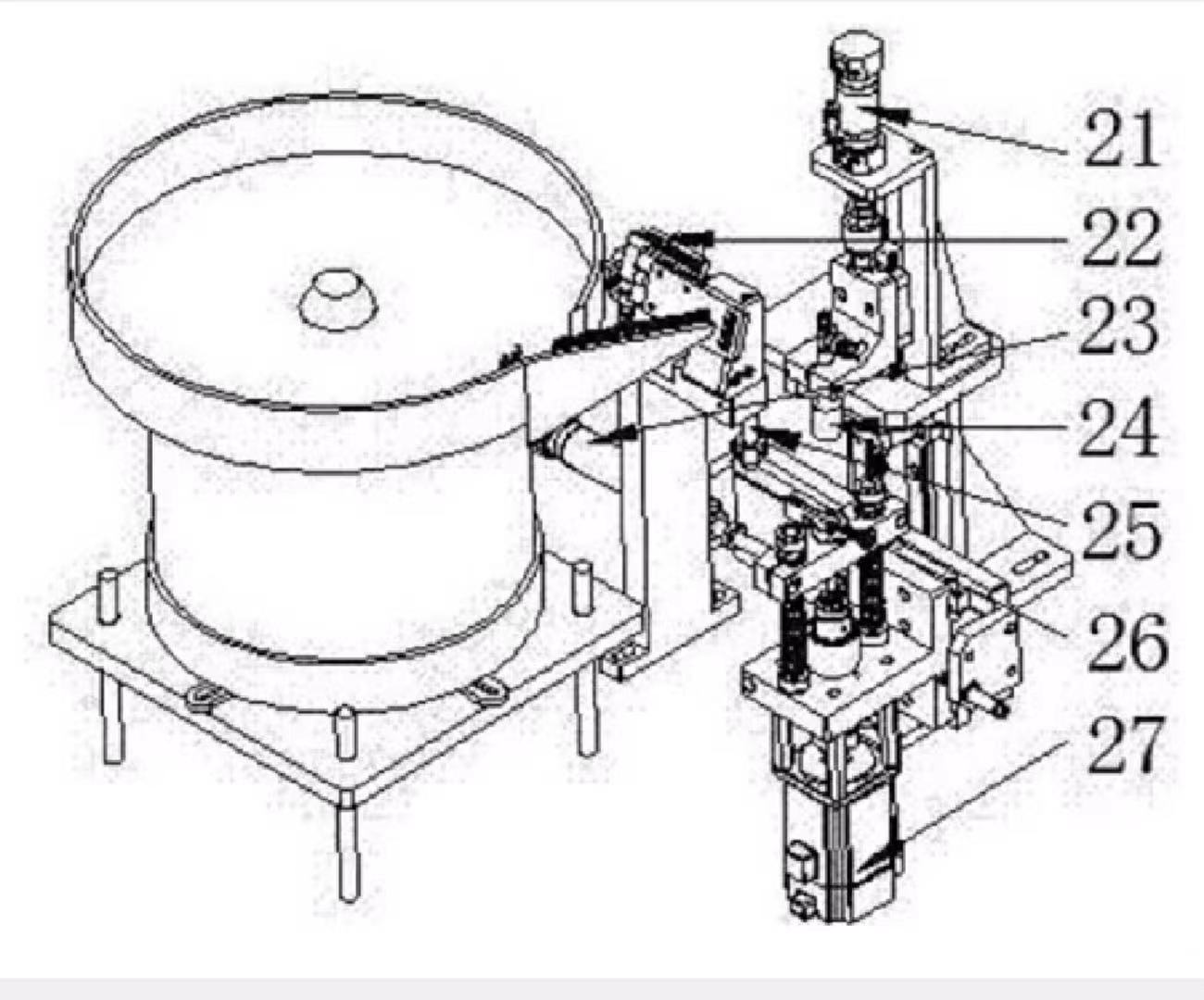
Sebagai proses utama pemasanganteras injappada injap, mengunci teras injap mempunyai keperluan yang sangat tinggi pada ketepatan kedudukan pergerakan teras injap, jadi ia memerlukan penyelarasan mekanisme membujur dan sisi untuk diselesaikan. Dalam reka bentuk bahagian ini, ia diuraikan menjadi satu tindakan, tindakan pelepasan teras injap, tindakan mengunci tuil pengunci dan tindakan memuatkan teras injap pada muncung injap. Struktur mekanikalnya ditunjukkan dalam Rajah 2. Seperti yang dapat dilihat dari Rajah 2, struktur mekanikal pemasangan teras injap dibahagikan kepada tiga bahagian. Ketiga-tiga bahagian berfungsi dalam penyelarasan tanpa menjejaskan satu sama lain. Apabila tindakan bebas selesai, silinder menolak mekanisme untuk bergerak ke kedudukan pemasangan seterusnya.
Untuk memastikan ketepatan kedudukan bergerak, reka bentuk komprehensif kawalan elektrik dan had mekanikal digunakan untuk mengawal ralat dalam 1.4mm. Teras injap dan bahagian tengah muncung injap adalah sepaksi, supaya motor servo boleh menolak teras injap ke dalam muncung injap dengan lancar, jika tidak, ia akan menyebabkan kerosakan pada bahagian. Terhentinya struktur mekanikal atau denyutan isyarat elektrik yang tidak normal boleh menyebabkan sedikit penyelewengan dalam kerja pemasangan. Akibatnya, selepas teras injap dipasang, prestasi pengudaraan tidak mencapai standard, dan ketinggian pemasangan tidak layak, yang membawa kepada kegagalan produk. Faktor ini dipertimbangkan sepenuhnya dalam reka bentuk sistem, pengesanan hembusan udara dan pengesanan ketinggian digunakan untuk menyusun produk yang tidak baik.
Masa siaran: Sep-09-2022
